Installing MicroPython¶
To support the MicroPython PSoC6™ port installation the mpy-psoc6.py python script is provided. It is compatible with Windows,
Linux and MacOS.
You can easily download the script from the terminal with the following command:
$ curl -s -L https://raw.githubusercontent.com/infineon/micropython/ports-psoc6-main/tools/psoc6/mpy-psoc6.py > mpy-psoc6.py
Make sure you have a recent version on Python3.x installed and the pip package installer. Then install the following packages:
$ pip install requests
Find all the available commands and options by running the script with the command help:
$ python mpy-psoc6.py --help
Device setup¶
In order to setup MicroPython in a PSoC6™ board, the device-setup command of the mpy-psoc6.py
utility can be executed. Follow the instructions to select the target PSoC6™ board, and deploy the latest
MicropPython firmware version:
$ python mpy-psoc6.py device-setup
You can run this command any time you want to upgrade to the latest MicroPython firmware version. This command will take care of the following steps:
Download and install fw-loader, which will be used to update the board flasher firmware.
Download and install openocd, which is the software required to deploy a firmware file on PSoC6™ controllers
Download the latest
.hexfile for your selected boardDeploy the latest version of MicroPython firmware on your board
Install a previous version¶
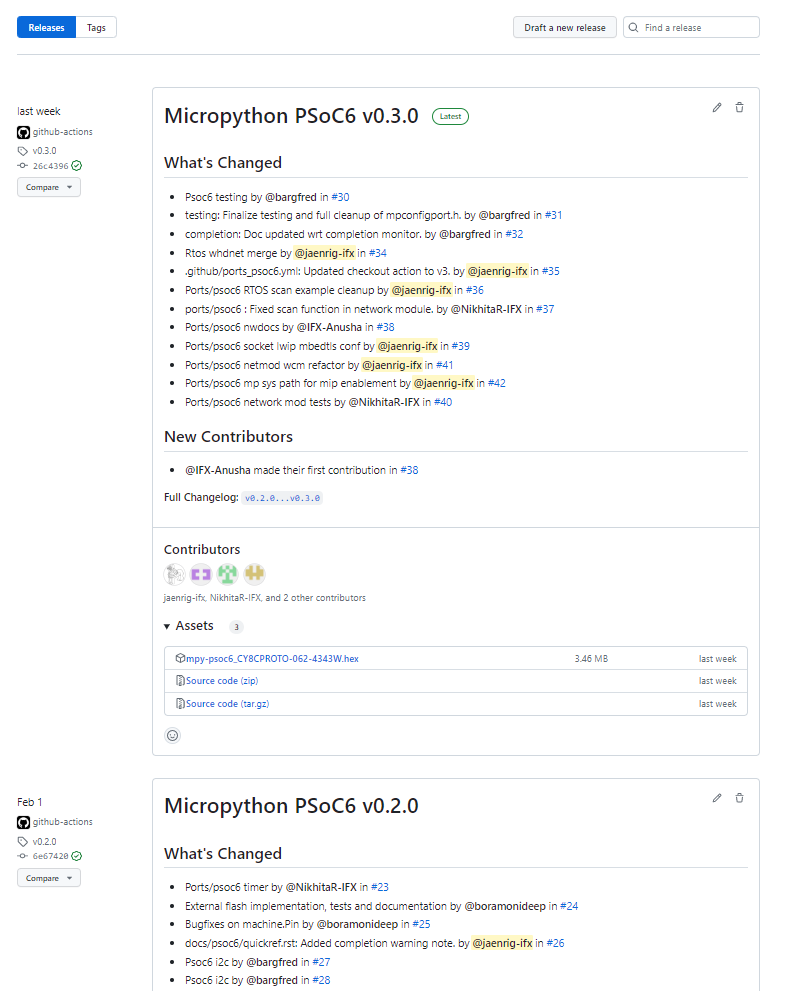
If you want to setup the device with a previous firmware version, you can check the list of available release in the GitHub release section.
The device-setup command can as well assist you with this process. In this case, the board and the desired
version need to be passed as arguments.
$ python mpy-psoc6.py device-setup -b CY8CPROTO-062-4343W -v v0.1.1
Warning
Be sure to provide the board name as shown in the device-setup command when run in interactive mode.
Equally, provide a valid tag existing in the release section with the format v.x.y.z.
No fail safe mechanisms or error verifications are (yet) implemented on the mpy-psoc6.py utility, and the script will fail to retrieve the necessary firmware file.
Updating the flasher firmware¶
The evaluation PSoC6™ boards include an integrated hardware programmer tool using KitProg firmware. Some older boards will come preflashed with KitProg version 2. In MicroPython PSoC6™ port it is required to use KitProg version 3, and the setup process will fail for version 2.
By default, device-setup automatically updates the flasher firmware, ensuring compatibility with the rest of the flashing tools.
If you want to skip the KitProg firmware update step, you can use the flag -s or --skip-fw-update during the device-setup process.
$ python mpy-psoc6.py device-setup -s
Direct binary flashing¶
Another alternative to program the board is to directly provide the binary file. The firmware-deploy command is enabling this option.
The board needs to be specified, and the path and name of the .hex file:
$ python mpy-psoc6.py firmware-deploy -b CY8CPROTO-062-4343W -f pathtodir/mpy-psoc6_CY8CPROTO-062-4343W.hex
Erasing the device (external) file system¶
Some PSoC6™ boards include an external flash memory which is used by the MicroPython file system. This memory will not be erased when
reprogramming or erasing MicroPython firmware via device-setup or firmware-deploy.
Use the device-erase command to erase of the external memory of your PSoC6™ device:
$ python mpy-psoc6.py device-erase
Warning
This command flashes the PSoC6™ controller with a custom program to delete the external memory. Thus, MicroPython will be removed from the microcontroller. Use any of the script commands described above to reinstall MicroPython.
Getting the firmware¶
The binary .hex files are available in the GitHub release section. All PSoC6™ firmware versions for each of the supported boards can be found there.
Other installation methods¶
Cypress Programmer¶
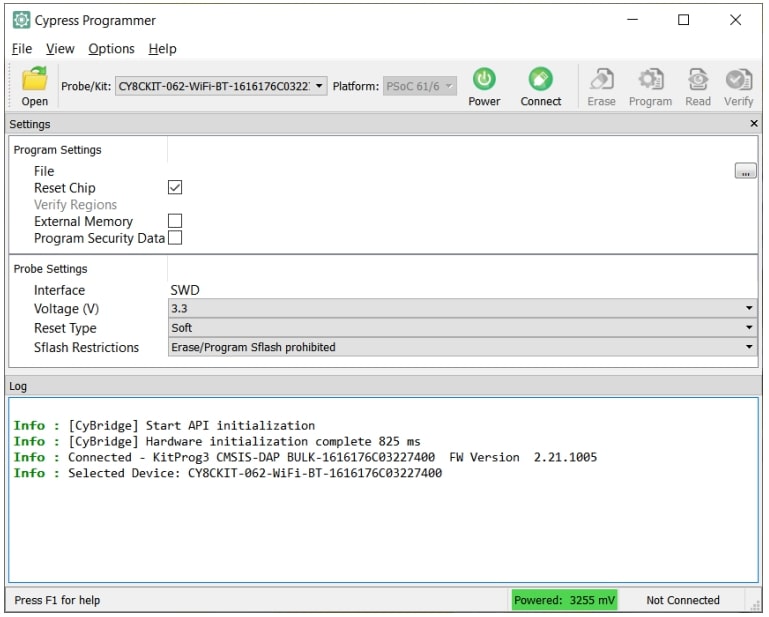
Alternatively, you can use directly flash the firmware binary file with the Cypress Programmer It allows to program the PSoC6™ microcontrollers family in a few clicks from your Windows, Linux or Mac OS machine. Follow the instructions on the provided link to download and install the tool.
After that, select the downloaded MicroPython firmware .hex file to be deployed on the PSoC6™. Then, in the upper menu, select the connected Probe/Kit, click on Connect, and finally click on Program. The log section will show the progress and inform when the firmware deployment on the controller is completed.
For a detailed description on how to use the Cypress Programmer tool, please consult the Cypress Programmer User Guide.